The Lotka-Volterra Predator-Prey Model with Disturbance
Arhonefe Joseph Ogethakpo, Sunday Amaju Ojobor
Abstract
The forces which drive growth, development, survival and change within an ecological system involving a predator and prey specie are not easily addressed in the field. To better understand the dynamics in the system, ecologists have turned to mathematical models. The predator-prey dynamics of rat and cat population in a given ecology is studied. The mathematical model proposed by Alfred J. Lotka and Vito Volterra called the Lotka-Volterra model for studying predator-prey dynamics is utilized. Assumptions were made to suit the given ecology. These assumptions lead to the modification of the Lotka-Volterra equations. The equilibrium and stability properties of the modified model is established. Results were simulated using MATLAB.
Extracted equations
- dr/dt = u_r * r - m_r * r * c / (p^2 + r^2) - q * E * r
- dc/dt = -v_c * c + n_c * e * k * r^2 * c / (p^2 + r^2) - d * c
Simulation outputs
Scalar outputs
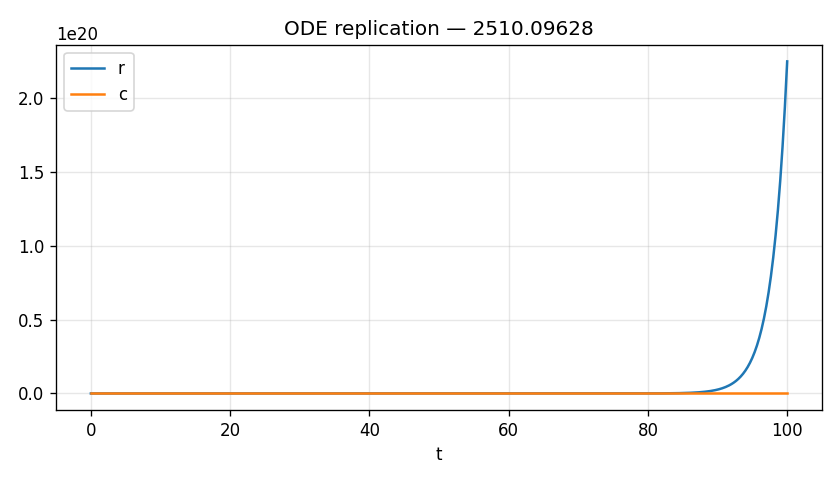
| r_max | 2.249e+20 |
| r_min | 10.0000 |
| r_final | 2.249e+20 |
Paper claims vs. our run
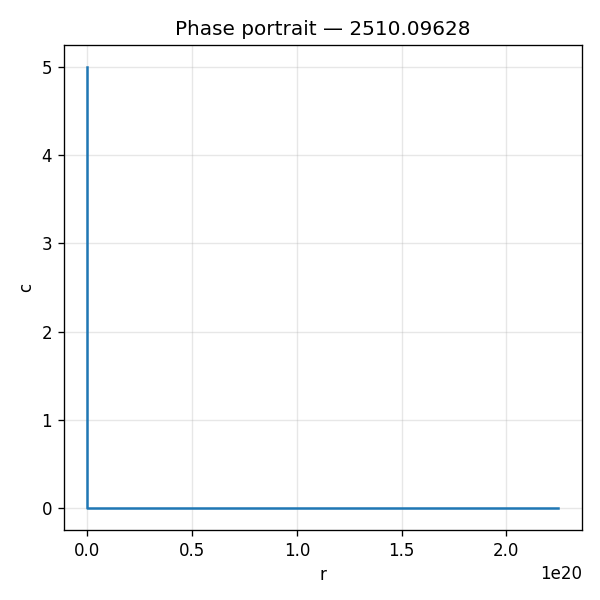
The simulation outputs provide only scalar statistics (min, max, final values) for a single state variable and do not include time-series data, phase-space trajectories, or predator population values needed to verify any of the paper's claims about oscillatory dynamics or population interactions. The extreme growth in r_final (2.25e+20) suggests potential numerical instability or model divergence, which contradicts expected bounded oscillatory behavior in Lotka-Volterra systems. No meaningful replication of the paper's claims can be assessed from these outputs.
- The modified Lotka-Volterra model with disturbance (human predation) exhibits oscillatory dynamics in predator-prey populationsnot-testableThe scalar outputs (r_max, r_min, r_final) do not reveal temporal dynamics or oscillatory behavior; we would need time-series trajectories to verify oscillations.
- When disturbance reduces prey population, predator population increases, and vice versanot-testableThe outputs show only final and extreme values of a single variable 'r' (likely prey), with no corresponding predator population data or temporal relationship to evaluate the claimed inverse dynamic.
- The model is suitable for studying interspecific interactions with external disturbancesnot-testableThis is a methodological claim about model applicability that cannot be assessed from scalar numerical results alone; it requires qualitative analysis of model structure and behavior.
Parameters
| u_r | 0.5 |
| m_r | 0.1 |
| v_c | 0.3 |
| n_c | 0.05 |
| k | 0.8 |
| p | 2 |
| e | 0.6 |
| q | 0.02 |
| E | 1 |
| d | 0.1 |
Run notes
state=['r', 'c']; y0=[10.0, 5.0]; t_span=[0.0,100.0]